 材料その1(上から、
材料その1(上から、13mm x 38mm x 610mm,
6mm x 38mm x 610mm,
6mm x 89mm x 610mm,
19mm x 19mm x 610mm)
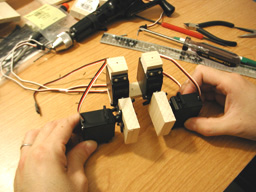
 材料その2(上左から、サーボモーター9個,木ネジ(長いのと短いの),電池ボックス&電池,無線受信用IC,H8マイコンボード,配線用ワイヤー黒・赤)
材料その2(上左から、サーボモーター9個,木ネジ(長いのと短いの),電池ボックス&電池,無線受信用IC,H8マイコンボード,配線用ワイヤー黒・赤)
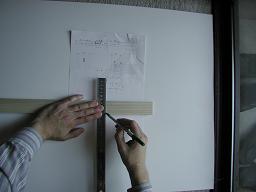 図面に従って、材料に線を引いていきます。脚用の左右2本の木だけは、正確な直角が必要なので、買ってきた木材の両端からそれぞれ切り出します。(両端は最初から直角がちゃんと出ているハズなので、そこに足裏用の板を取り付ければ、脚が地面に対して垂直に立ちます)
図面に従って、材料に線を引いていきます。脚用の左右2本の木だけは、正確な直角が必要なので、買ってきた木材の両端からそれぞれ切り出します。(両端は最初から直角がちゃんと出ているハズなので、そこに足裏用の板を取り付ければ、脚が地面に対して垂直に立ちます)
 引いた線の通りに、ノコギリで切っていきます。多少ゆがんでも全く問題ありません。
引いた線の通りに、ノコギリで切っていきます。多少ゆがんでも全く問題ありません。
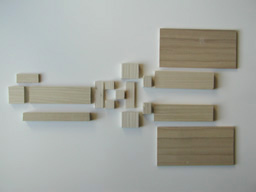 全ての材料を切り終わった様子です。
全ての材料を切り終わった様子です。
各材料の寸法は掲示板の発言 64 に載っていますが、こちらの切り出し図面の方がわかりやすいでしょう。
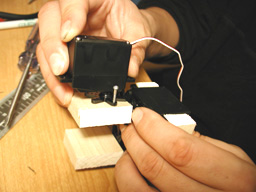
 サーボモーターに付属のゴムブッシュ、金属ブッシュをまずセットします。この写真では、すでにサーボホーンが取り付けられていますが、後ほど取り付けた方がいいでしょう。
サーボモーターに付属のゴムブッシュ、金属ブッシュをまずセットします。この写真では、すでにサーボホーンが取り付けられていますが、後ほど取り付けた方がいいでしょう。
 サーボモーターに付属の木ネジを使用して、木に固定していきます。その時、木とサーボモーターの間に隙間ができないように注意します。自分で切った切断面がネジ留めの面にならないように注意します。ゴムブッシュが途中で外れたらまたネジをゆるめ、金属ブッシュを外し、ゴムブッシュを直してから留め直します。
サーボモーターに付属の木ネジを使用して、木に固定していきます。その時、木とサーボモーターの間に隙間ができないように注意します。自分で切った切断面がネジ留めの面にならないように注意します。ゴムブッシュが途中で外れたらまたネジをゆるめ、金属ブッシュを外し、ゴムブッシュを直してから留め直します。
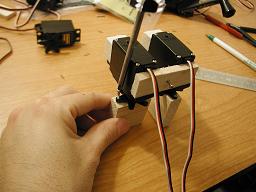
 まずは腰の部分の、サーボモーターが3個集まっている部分を組み立てます。仮組みした後、プラスチックバンドで周りを固定しておくと作業がやりやすくなります。サーボモーター間に隙間ができないように両側から押さえながらネジ留めします。
まずは腰の部分の、サーボモーターが3個集まっている部分を組み立てます。仮組みした後、プラスチックバンドで周りを固定しておくと作業がやりやすくなります。サーボモーター間に隙間ができないように両側から押さえながらネジ留めします。
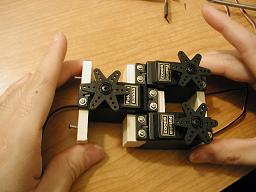
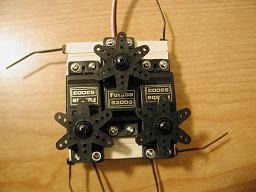 全てのサーボモーターをネジ留めし、仮組みが完了した様子です。
全てのサーボモーターをネジ留めし、仮組みが完了した様子です。
 木とサーボモーターの中心に木ネジが来るように位置を決めます。
木とサーボモーターの中心に木ネジが来るように位置を決めます。
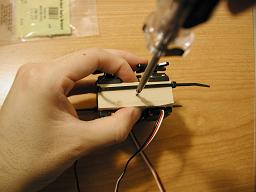 ドリルで下穴を開けてから木ネジで固定しますが、後の作業で一度外すので、最後まで締める必要はありません。
ドリルで下穴を開けてから木ネジで固定しますが、後の作業で一度外すので、最後まで締める必要はありません。
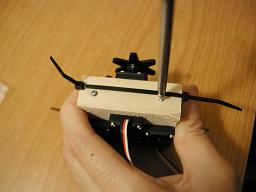 反対側も同じように、木ネジで固定します。こちらも最後まで締める必要はありません。
反対側も同じように、木ネジで固定します。こちらも最後まで締める必要はありません。
 サーボモーターのホーンの穴(一番外側)を、ドリル(2.0mm)を使って少し大きくしておきます。これをせずにネジを入れると、サーボホーンが割れてしまいます。
サーボホーンは、6本足の物を使用します。
サーボモーターのホーンの穴(一番外側)を、ドリル(2.0mm)を使って少し大きくしておきます。これをせずにネジを入れると、サーボホーンが割れてしまいます。
サーボホーンは、6本足の物を使用します。
 サーボホーンを取り付けます。この時、センター角度を決める必要があります。
まず、適当に仮止めした(ネジ留めしない)サーボホーンを手で一番左の止まる角度まで回します。
この角度で、黄色線で示した辺がほんの少しだけ下を向くようなホーンとサーボ軸の組み合わせを探します。
サーボホーンを取り付けます。この時、センター角度を決める必要があります。
まず、適当に仮止めした(ネジ留めしない)サーボホーンを手で一番左の止まる角度まで回します。
この角度で、黄色線で示した辺がほんの少しだけ下を向くようなホーンとサーボ軸の組み合わせを探します。
 その状態で、今度はサーボホーンを一番右の止まる角度まで回します。
その時、黄色線で示した辺が、ほんの少しだけ下を向いていればOKです。この辺がなかなか微妙ですが、やってみればすぐに要領がつかめるでしょう。
なお、首用と腕(頭?)振り用のサーボだけは、この写真とは違いセンター角度を 90 度ずらす必要がありますので注意してください。
その状態で、今度はサーボホーンを一番右の止まる角度まで回します。
その時、黄色線で示した辺が、ほんの少しだけ下を向いていればOKです。この辺がなかなか微妙ですが、やってみればすぐに要領がつかめるでしょう。
なお、首用と腕(頭?)振り用のサーボだけは、この写真とは違いセンター角度を 90 度ずらす必要がありますので注意してください。
 ヒザとなるサーボモーターのホーンを、脚用の木に木ネジ(短い方 2 x 1/2inch)で固定します。この時、自分で切断した面が上側(サーボに近い方)に来るように注意します。
サーボホーンは、センターから 90度回した角度にしておかないとドライバーが入りません。その際、サーボモーターの向きに注意してください。
写真では、サーボモーターがほぼ左いっぱいに回った状態となっています。
ヒザとなるサーボモーターのホーンを、脚用の木に木ネジ(短い方 2 x 1/2inch)で固定します。この時、自分で切断した面が上側(サーボに近い方)に来るように注意します。
サーボホーンは、センターから 90度回した角度にしておかないとドライバーが入りません。その際、サーボモーターの向きに注意してください。
写真では、サーボモーターがほぼ左いっぱいに回った状態となっています。
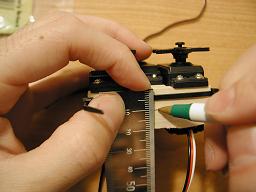
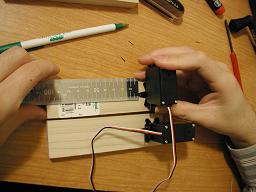 もう片方の脚のサーボモーターも固定しますが、その時、足板が付く部分からサーボホーンの端までの長さが、両足で同じになるように、きちんと測って固定します。この部分の長さが違うと、ロボットが完成した時の両足の長さが違ってしまいます。
もう片方の脚のサーボモーターも固定しますが、その時、足板が付く部分からサーボホーンの端までの長さが、両足で同じになるように、きちんと測って固定します。この部分の長さが違うと、ロボットが完成した時の両足の長さが違ってしまいます。
 一度仮組みした腰の部分の3本の木ネジをゆるめ、写真のように分割します。
一度仮組みした腰の部分の3本の木ネジをゆるめ、写真のように分割します。
 股関節用の木を、木ネジを使ってサーボホーンに固定します。この時、サーボホーンが当たる面は、自分が切断した面ではないので注意してください。
股関節用の木を、木ネジを使ってサーボホーンに固定します。この時、サーボホーンが当たる面は、自分が切断した面ではないので注意してください。
 個関節用の木に、別のサーボを固定します。この時、2つのサーボホーン同士が当たるような位置で(回転軸が直交するように)固定します。位置がずれていると、完成した時の両足の長さが違ってしまいます。
個関節用の木に、別のサーボを固定します。この時、2つのサーボホーン同士が当たるような位置で(回転軸が直交するように)固定します。位置がずれていると、完成した時の両足の長さが違ってしまいます。
 これで股関節の部分が完成ですが、腰用サーボモーターとの連結は、胴を取り付けた後で最後に行います。
これで股関節の部分が完成ですが、腰用サーボモーターとの連結は、胴を取り付けた後で最後に行います。
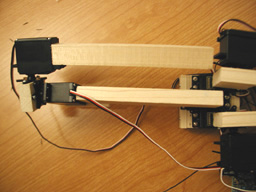
 脚が付いたヒザ用サーボモーターと、股関節サーボモーターを連結させた後、脚に足裏の板を取り付けます。この時、連結用の木は、切断面が前後方向を向く(サーボ面と接しない)ようにします。
写真では、すでに腰用サーボモータが見えていますが、ここではまだ組み合わせないでください。
脚が付いたヒザ用サーボモーターと、股関節サーボモーターを連結させた後、脚に足裏の板を取り付けます。この時、連結用の木は、切断面が前後方向を向く(サーボ面と接しない)ようにします。
写真では、すでに腰用サーボモータが見えていますが、ここではまだ組み合わせないでください。
 胴上部に首用サーボモーターを取り付け、そこに股関節と同じように腕用サーボモーターを取り付けますが、実際には、股関節の部分とはサーボホーンのセンター角度が2個とも 90 度違っていますので注意してください。
胴上部に首用サーボモーターを取り付け、そこに股関節と同じように腕用サーボモーターを取り付けますが、実際には、股関節の部分とはサーボホーンのセンター角度が2個とも 90 度違っていますので注意してください。
 胴を腰用サーボモーターに取り付けます。その後、先ほど分解した腰の部分の3個のサーボモーターを組み合わせ、仮止めしておいた木ネジ3本で留めます。
胴を腰用サーボモーターに取り付けます。その後、先ほど分解した腰の部分の3個のサーボモーターを組み合わせ、仮止めしておいた木ネジ3本で留めます。
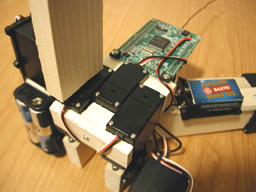 電池ボックスを両面テープで、マイコンボードを、サーボモーター用のゴムブッシュを半分に切った物を通し、木ネジで固定します。
電池ボックスを両面テープで、マイコンボードを、サーボモーター用のゴムブッシュを半分に切った物を通し、木ネジで固定します。
 脚に、足用の板を取り付けます。この時、長い方の木ねじ(2 x 5/8inch)を使います。
まず、足板の裏側から垂直に4本の木ネジを表側まで完全に貫通するまでねじ込みます。
その後、表側からほんの少し出るくらいまで木ネジをゆるめ、そこへ脚を乗せて、脚板の側面と足板の側面がきっちり揃った状態で徐々に木ネジを入れていきます。
脚に、足用の板を取り付けます。この時、長い方の木ねじ(2 x 5/8inch)を使います。
まず、足板の裏側から垂直に4本の木ネジを表側まで完全に貫通するまでねじ込みます。
その後、表側からほんの少し出るくらいまで木ネジをゆるめ、そこへ脚を乗せて、脚板の側面と足板の側面がきっちり揃った状態で徐々に木ネジを入れていきます。
 サーボモーター、電池ボックスからの線をマイコンボードに接続して、ついに完成!あ、最後に「目」を両面テープで付けるのをお忘れなく!
サーボモーター、電池ボックスからの線をマイコンボードに接続して、ついに完成!あ、最後に「目」を両面テープで付けるのをお忘れなく!